10G25GEMAC IP Core Data Sheet
10G/25G Ethernet PCS/PMA (10G/25G BASE-R)

Core Facts |
|
|
Provided with Core |
|
|
Documentation |
User Guide, Design Guide |
|
Design File Formats |
Encrypted HDL |
|
Instantiation Templates |
VHDL |
|
Reference Designs & Application Notes |
Vivado Project, See Reference Design Manual |
|
Additional Items |
Demo on KCU105/ZCU106/VCU118 |
|
Support |
|
|
Support Provided by Design Gateway Co., Ltd. |
|
Design Gateway Co.,Ltd
E-mail: ip-sales@design-gateway.com
URL: www.design-gateway.com
Features
· 10/25 Gbps Ethernet
· 64-bit XGMII interface running at 390.625 MHz for 25Gbps or 156.25 MHz for 10Gbps
· Same clock domain for transmit and receive XGMII interface
· AXI4-stream protocol for connecting with the user logic (TOE10G/25G IP, UDP10G IP)
· Low transmit and receive latencies (3 clock cycles for transmit side, 7 clock cycles fo receive side)
· FCS inserting (CRC-32) to the transmitted packet
· FCS checking (CRC-32) for the received packet
· Not appending the zero padding in the transmitted packet
· Not removing the zero padding from the received packet
· Support the 1st byte data on byte0 (bit[7:0]) or byte4 (bit[39:32]) of receive XGMII interface
Table 1: Example Implementation Statistics for Ultrascale device
|
Family |
Example Device |
Fmax (MHz) |
CLB Regs |
CLB LUTs |
CLB1 |
IOB |
BRAMTile2 |
Design Tools |
|
Kintex-Ultrascale |
XCKU040FFVA1156-2E |
156.25 |
1072 |
1873 |
326 |
- |
- |
Vivado2017.4 |
|
Zynq-Ultrascale+ |
XCZU9EG-FFVB1156-2-I |
156.25 |
1072 |
1873 |
333 |
- |
- |
Vivado2017.4 |
|
Virtex-Ultrascale+ |
XCU9P-FLGA2104-2L |
390.625 |
1075 |
1948 |
321 |
- |
- |
Vivado2017.4 |
Notes:
1) Actual logic resource dependent on percentage of unrelated logic
Table 2: Example Implementation Statistics for 7-Series device
|
Family |
Example Device |
Fmax (MHz) |
Slice Regs |
Slice LUTs |
Slices1 |
IOB |
BRAMTile2 |
Design Tools |
|
Kintex-7 |
XC7K325TFFG900-2 |
156.25 |
1107 |
1885 |
547 |
- |
- |
Vivado2017.4 |
|
Zynq-7000 |
XC7Z045FFG900-2 |
156.25 |
1107 |
1885 |
543 |
- |
- |
Vivado2017.4 |
|
Virtex-7 |
XC7VX485TFFG1761-2 |
156.25 |
1107 |
1886 |
557 |
- |
- |
Vivado2017.4 |
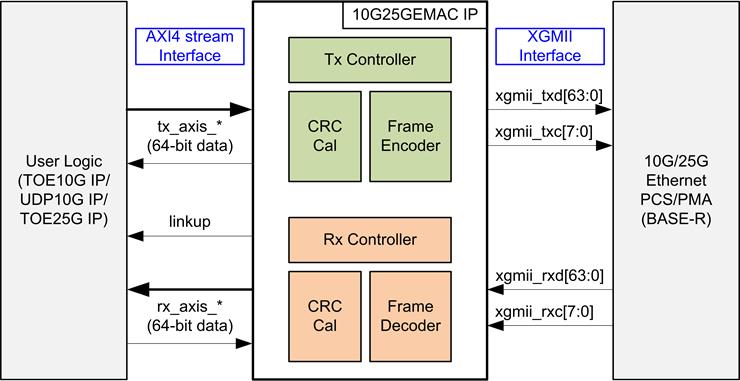
Figure 1: 10G25GEMAC IP Block Diagram
Applications
By using DG Network IP suite (TOE10G IP, TOE25G IP, UDP10G IP and 10G25GEMACIP), the system implemented on FPGA can transfer Ethernet packet via 10/25Gb Ethernet following TCP/IP protocol or UDP/IP protocol with achieving good performance and small resource utilization. It is the solution to implement Ethernet data streaming and monitoring system without CPU and external memory usage.
General Description
On the other hand, the received packet from XGMII interface is verified by 10G25GEMAC IP. The preamble, SFD, and FCS are removed from the received packet before forwarding to AXI4 stream interface. If the FCS is not correct, the IP asserts the error signal to AXI4 stream interface.
Data input stream between start of frame and end of frame on AXI4 stream interface must be valid every clock because 10G25GEMAC IP does not include Tx buffer to pause data transmission to 10G/25G Ethernet PHY (PCS/PMA). Similar to transmit path, the received packet from 10G/25G Ethernet PHY is forwarded to AXI4 stream interface continuously because there is no internal buffer of receive path in 10G25GEMAC IP.
10G25GEMAC IP does not support zero padding function, so the user logic on AXI4 stream interface must append the padding by itself for the small packet which is less than 60-byte size. 10G25GEMAC IP supports receiving the packet from XGMII interface when the 1st byte is placed on byte0 (xgmii_rxd[7:0]) and byte4 (xgmii_rxd[39:32]). Otherwise, the received packet is ignored.
Functional Description
10G25GEMAC IP is designed to support data transmission in both directions at the same time. So, the logic to transmit data and receive data is run independently.
Transmit Block
· CRC Cal
This module is designed to calculate 32-bit CRC from 64-bit data, input from AXI4 stream interface. The polynomial of CRC-32 to create FCS following IEEE802.3 standard is as follows.
P(X) = X32 + X26 + X23 + X22 + X16 + X12 + X11 + X10 + X8 + X7 + X5 + X4 + X2 + X1 + 1
FCS is appended to the packet as the footer after finishing forwarding all data.
· Frame Encoder
This module inserts the header and the footer to the transmit packet from AXI4 stream interface. 7-byte preamble and 1-byte SFD (Start of frame delimiter) are appended as the header of the packet while 4-byte FCS and 1-byte EFD (End of frame delimiter) are appended as the footer of the packet. After finishing one frame, 12-Idle cycle is inserted to be IFG (interframe gap) between two packets.
· Tx Controller
The controller monitors the control signals on AXI4 stream interface. When the new frame is found, it asserts the control signal to the frame encoder for inserting the header and the footer into the frame. After that, the controller deasserts ready signal on AXI4 stream interface for 3 clock cycles to finish FCS, EFD and interframe gap insertion process.
Receive Block
· CRC Cal
This module is the same module as CRC Cal in Transmit Block. The FCS output from this module is applied to verify the received packet. The error is asserted on Rx AXI4 stream interface if the FCS in the received packet is not correct.
· Frame Decoder
The data and control signals from XGMII interface are decoded to check link up status, start of frame and end of frame. The data type output from the decoder is forwarded to Rx controller to validate the data orderring in the packet. The received packet removing the header and the footer is rearranged to align the 1st byte data of the packet on byte0 only. So, the 1st byte data on AXI4 stream interface is always on rx_axis_tdata[7:0].
· Rx Controller
The controller checks SFD and FCS in the received packet. The controller asserts the data valid to AXI4 stream interface when the packet header is correct. The error is asserted by the controller when the FCS of the packet is not correct.
User Logic
For transferring data by using TCP/IP protocol or UDP/IP protocol, the user interface of 10G25GEMAC IP can be connected with DG TOE10G IP for TCP/IP solution on 10Gb Ethernet, DG UDP10G IP for UDP/IP solution on 10Gb Ethernet or DG TOE25G IP for TCP/IP solution on 25Gb Ethernet.
More details of the IP are described in the datasheet.
https://dgway.com/products/IP/TOE10G-IP/dg_toe10gip_data_sheet_xilinx_en.pdf
https://dgway.com/products/IP/UDP10G-IP/dg_udp10gip_data_sheet_xilinx_en.pdf
https://dgway.com/products/IP/TOE25G-IP/dg_toe25gip_data_sheet_xilinx_en.pdf
10G/25G Ethernet PCS/PMA (10G/25G BASE-R)
10G/25G Gigabit Ethernet PCS/PMA (10G/25GBASE-R) core is no charge Xilinx IP core. The interface with EMAC is 64-bit XGMII. Physical interface is connected to SFP+/SFP28 optical module. For more details, please download the IP datasheet from the following link.
https://www.xilinx.com/products/intellectual-property/10gbase-r.html
https://www.xilinx.com/products/intellectual-property/ef-di-25gemac.html
Core I/O Signals
Descriptions of all signal I/Os are provided in Table 3.
Table 3: Core I/O Signals
|
Signal |
Dir |
Description |
|
RstB |
In |
Reset IP core. Active Low. |
|
Clk |
In |
Fixed clock frequency input, synchronous to XGMII interface. 390.625 MHz for 25GbE or 156.25 MHz for 10GbE. |
|
IPVersion[31:0] |
Out |
IP version number |
|
Linkup |
Out |
Assert to �1� when Rx XGMII sends idle code (PHY initialization is finished). |
|
AXI4 stream interface |
||
|
tx_axis_tdata[63:0] |
In |
Transmitted data to AXI4 stream interface. Valid when tx_axis_tvalid is asserted to �1�. |
|
tx_axis_tkeep[7:0] |
In |
Byte enable of 64-bit tx_axi_tdata. One bit is asserted to �1� when each byte is valid. Bit[0],[1],[2],�,[7] for tdata[7:0],[15:8],[23:16],�,[63:56] respectively. This signal must be equal to 0xFF to enable every data in the packet, except the last word which the data may be valid only some bytes. The byte enable of the last byte has 8 values, i.e. 0x01, 0x03, 0x07, 0x0F, 0x1F, 0x3F, 0x7F, and 0xFF when last data is valid for 1 byte � 8 byte. The signal is valid when tx_axis_tvalid is asserted to �1�. |
|
tx_axis_tvalid |
In |
Transmitted data valid signal. Assert to �1� when tx_axis_tdata/tkeep are valid. |
|
tx_axis_tlast |
In |
Assert to �1� to indicate the final word in the frame. Valid when tx_axis_tvalid is asserted to �1�. |
|
tx_axis_tready |
Out |
Handshaking signal. Asserted to �1� when tx_axis_tdata has been accepted. This signal is not de-asserted to �0� when the packet is transmitting. |
|
rx_axis_tdata[63:0] |
Out |
Received data. Valid when rx_axis_tvalid is asserted to �1�. |
|
rx_axis_tkeep[7:0] |
Out |
Received data byte enable. One bit is asserted to �1� when each byte is valid. Bit[0],[1],[2],�,[7] for tdata[7:0],[15:8],[23:16],�,[63:56] respectively. The signal is valid when rx_axis_tvalid is asserted to �1�. |
|
rx_axis_tvalid |
Out |
Received data valid signal. Assert to �1� when rx_axis_tdata/tkeep are valid. |
|
rx_axis_tlast |
Out |
Assert to �1� to indicate the final word in the frame. Valid when rx_axis_tvalid is asserted to �1�. |
|
rx_axis_tuser |
Out |
Asserted at the end of the frame to indicate that the frame has an error. �1�: normal packet, �0�: error packet. Valid when rx_axis_tlast and rx_axis_tvalid are asserted to �1�. |
|
XGMII interface |
||
|
xgmii_txd[63:0] |
Out |
Transmit data to PHY |
|
xgmii_txc[7:0] |
Out |
Transmit control to PHY |
|
xgmii_rxd[63:0] |
In |
Receive data from PHY |
|
xgmii_rxc[7:0] |
In |
Receive control from PHY |
Timing Diagram
IP Initialization
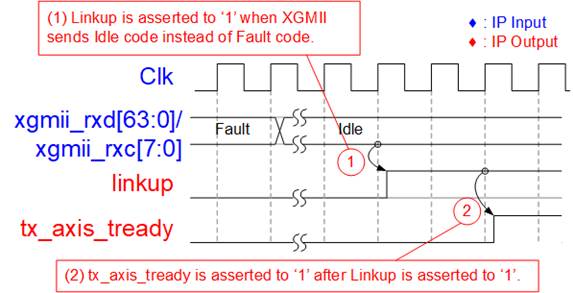
Figure 2: Linkup status
After finishing reset sequence, the IP monitors the received data from XGMII interface. When PHY is not ready, Fault code is returned from XGMII interface. After PHY finishes the initialization, XGMII sends Idle code instead of Fault code. After that, the IP asserts linkup to �1� and then asserts tx_axis_tready to �1�. Finally, the IP is ready to transfer the packet between AXI4 stream interface and XGMII interface.
Transmit interface
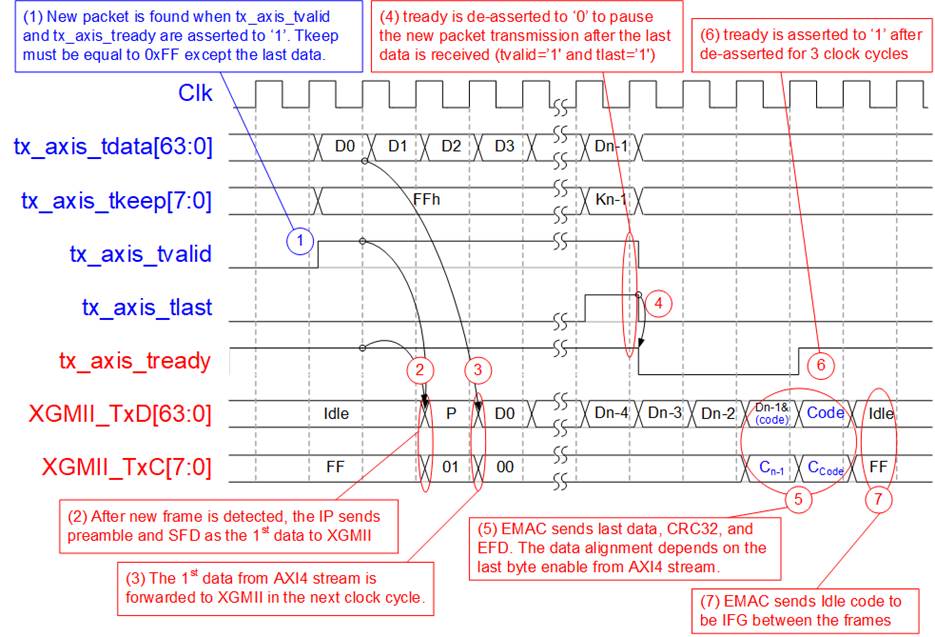
Figure 3: Transmit packet timing diagram
The example to send the data stream from AXI4 stream to XGMII is shown in Figure 3.
(1) The new packet is found when tx_axis_tvalid is asserted to �1� and the IP is ready to receive data (tx_axis_tready=�1�). Tkeep input from all data must be equal to 0xFF because all 64-byte data from AXI4 stream must be valid, except the last data. The last byte enable depends on the number of valid bytes of the last data on AXI4 stream interface.
(2) The IP starts the operation to calculate FCS (CRC-32) and appends 7-byte preamble with SFD to the packet as the 1st data.
(3) The IP forwards the 1st data from AXI4 stream to XGMII with 3 clock cycle latency time. TxC value during data forwarding is always equal to 0x00, except the last data which depends on tkeep input at the end of frame.
(4) After the last data is found (detected by tvalid=�1� and tlast=�1�), the IP ready (tx_axis_tready) is de-asserted to �0� for 3 clock cycles. 3-clock cycle is the time for the IP inserting 4-byte FCS, EFD, and 12-byte Idle for IFG. Also, it is the time to compensate the run time for inserting 8-byte header (7-byte preamble and SFD).
(5) The last data from AXI4 stream is forwarded to XGMII. If the last data is not aligned to 8, the IP appends the footer (4-byte FCS, EFD, and 12-byte Idle) to the remaining byte. The remaining footer is transmitted to XGMII in the next clock.
(6) The IP re-asserts tready to �1� after de-asserting for 3 clock cycles.
(7) The IP sends at least 12-byte Idle code and waits for the new packet.
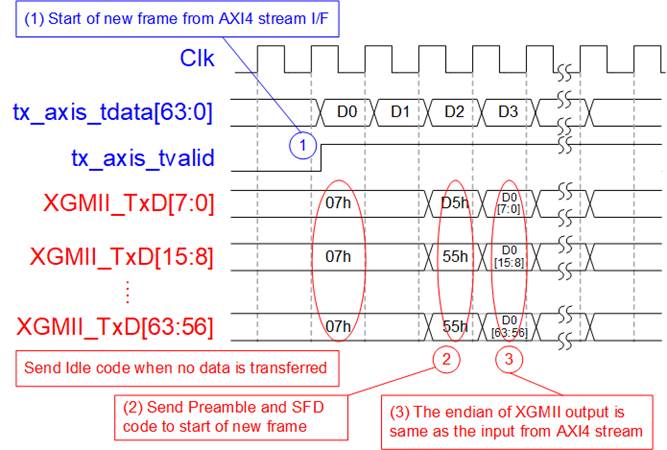
Figure 4: Transmit packet endian
Figure 4 shows more details of the endian relation between the data input from AXI4 stream interface and the data output to XGMII interface. The endian of the data does not change. After sending Idle code, Preamble and SFD, byte0 of the 1st data (D0[7:0]) is placed on XGMII_TxD[7:0], byte1 on XGMII_TxD[15:8], and so on.
Receive Interface

Figure 5: Received packet timing diagram when the 1st data is on byte0

Figure 6: Received packet timing diagram when the 1st data is on byte4
The examples to receive the data stream from XGMII to AXI4 stream are shown in Figure 5 and Figure 6. Two examples are displayed to show the different format of the 1st byte data which may be placed on byte0 or byte4. Though the 1st data position is different, the latency of the output (measured from the 1st data) in both examples are equal to 7 clock cycles. The details of timing diagram is as follows.
(1) The IP detects SFD code on XGMII interface. The IP rearranges the received packet following the position of the SFD code. The 1st data is received on XGMII_Rx bus in the next clock for 8-byte (Figure 5) or 4-byte (Figure 6).
(2) After receiving the 1st data, the IP sends the 1st data which is reformatted to place the 1st byte on byte0 only with 7-clock cycle latency time. Tkeep is always equal to 0xFF, except the last data which depends on the number of valid bytes.
(3) After the IP detects EFD code on XGMII interface, FCS is loaded to compare with the calculated FCS value.
(4) After that, the IP asserts rx_axis_tlast and tvalid to �1� with the last data on tdata bus. In this clock, rx_axis_tuser is asserted to �1� if the received FCS is equal to the calculated FCS. Otherwise, tuser is de-asserted to �0� for error status.
After the IP sends the last data, rx_axis_tvalid is de-asserted to �0� at least 2 clock cycles which is the time for removing preamble, SFD, EFD, and IFG from XGMII received data.

Figure 7: Received packet endian
Similar to Tx path, the endian of the data input from XGMII interface to the data output of AXI4 stream interface does not change.
Verification Methods
The 10G25GEMAC IP Core functionality was verified by simulation and also proved on real board design by using KCU105, ZCU106 and VCU118 evaluation board.
Recommended Design Experience
User must be familiar with HDL design methodology to integrate this IP into the design.
Ordering Information
This product is available directly from Design Gateway Co., Ltd. Please contact Design Gatway Co., Ltd. for pricing and additional information about this product using the contact information on the front page of this datasheet.
Revision History
|
Revision |
Date |
Description |
|
1.0 |
Jul-3-2019 |
New release |
|
1.1 |
Jul-21-2020 |
Add IPVersion signal and support 25Gb Ethernet |
|
1.2 |
Aug-19-2020 |
Rename IP from TenGEMAC IP to 10G25GEMAC IP |
|
1.3 |
Aug-24-2020 |
Update company information |